Every year at SIGGRAPH (and sometimes at other points in the year), members of the Hyperion team inevitably get asked if there is any publicly available information about Disney’s Hyperion Renderer.
The answer is: yes, there is actually a lot of publicly available information!
One amazing aspect of working at Walt Disney Animation Studios is the huge amount of support and encouragement we get from our managers and the wider studio for publishing and sharing our work with the wider academic world and industry.
As part of this sharing, the Hyperion team has had the opportunity to publish a number of papers over the years detailing various interesting techniques used in the renderer.
I think it’s very important to mention here that another one of my favorite aspects of working on the Hyperion team is the deep collaboration we get to engage in with our sister rendering team at DisneyResearch|Studios (formerly known as Disney Research Zürich).
The vast majority of the Hyperion team’s publications are joint works with DisneyResearch|Studios, and I personally think it’s fair to say that all of Hyperion’s most interesting advanced features are just as much the result of research and work from DisneyResearch|Studios as they are the result of our team’s own work.
Without a doubt, Hyperion, and by extension, our movies, would not be what they are today without DisneyResearch|Studios.
Of course, we also collaborate closely with our sister rendering teams at Pixar Animation Studios and Industrial Light & Magic as well, and there are numerous examples where collaboration between all of these teams has advanced the state of the art in rendering for the whole industry.
So without further ado, below are all of the papers that the Hyperion team has published or worked on or had involvement with over the years, either by ourselves or with our counterparts at DisneyResearch|Studios, Pixar, ILM, and other research groups.
If you’ve ever been curious to learn more about Disney’s Hyperion Renderer, here are 52 publications with a combined 571 pages of material!
For each paper, I’ll link to a preprint version, link to the official publisher’s version, and link any additional relevant resources for the paper.
Please see publisher’s version or project page links for any additional supplemental materials that go with each paper.
I’ll also give the citation information, give a brief description, list the teams involved, and note how the paper is relevant to Hyperion.
This post is meant to be a living document; I’ll come back and update it down the line with future publications. Publications are listed in chronological order.
-
Ptex: Per-Face Texture Mapping for Production Rendering
Brent Burley and Dylan Lacewell. Ptex: Per-face Texture Mapping for Production Rendering. Computer Graphics Forum (Proceedings of Eurographics Symposium on Rendering 2008), 27(4), June 2008.
Internal project from Disney Animation. This paper describes per-face textures, a UV-free way of texture mapping. Ptex is the texturing system used in Hyperion for all non-procedural texture maps. Every Disney Animation film made using Hyperion is textured entirely with Ptex. Ptex is also available in many commercial renderers, such as Pixar’s RenderMan!
-
Physically-Based Shading at Disney
Brent Burley. Physically Based Shading at Disney. In ACM SIGGRAPH 2012 Course Notes: Practical Physically-Based Shading in Film and Game Production, August 2012.
Internal project from Disney Animation. This paper describes the Disney BRDF, a physically principled shading model with a artist-friendly parameterization and layering system. The Disney BRDF is the basis of Hyperion’s entire shading system. The Disney BRDF has also gained widespread industry adoption the basis of a wide variety of physically based shading systems, and has influenced the design of shading systems in a number of other production renderers. Every Disney Animation film made using Hyperion is shaded using the Disney BSDF (an extended version of the Disney BRDF, described in a later paper).
-
Sorted Deferred Shading for Production Path Tracing
Christian Eisenacher, Gregory Nichols, Andrew Selle, and Brent Burley. Sorted Deferred Shading for Production Path Tracing. Computer Graphics Forum (Proceedings of Eurographics Symposium on Rendering 2013), 32(4), June 2013.
Internal project from Disney Animation. Won the Best Paper Award at EGSR 2013! This paper describes the sorted deferred shading architecture that is at the very core of Hyperion. Along with the previous two papers in this list, this is one of the foundational papers for Hyperion; every film rendered using Hyperion is rendered using this architecture.
-
Residual Ratio Tracking for Estimating Attenuation in Participating Media
Jan Novák, Andrew Selle, and Wojciech Jarosz. Residual Ratio Tracking for Estimating Attenuation in Participating Media. ACM Transactions on Graphics (Proceedings of SIGGRAPH Asia 2014), 33(6), November 2014.
Joint project between DisneyResearch|Studios and Disney Animation. This paper described a pair of new, complementary techniques for evaluating transmittance in heterogeneous volumes. These two techniques made up the core of Hyperion’s first and second generation volume rendering implementations, used from Big Hero 6 up through Moana.
-
Visualizing Building Interiors using Virtual Windows
Norman Moses Joseph, Brett Achorn, Sean D. Jenkins, and Hank Driskill. Visualizing Building Interiors using Virtual Windows. In ACM SIGGRAPH Asia 2014 Technical Briefs, December 2014.
Internal project from Disney Animation. This paper describes Hyperion’s “hologram shader”, which is used for creating the appearance of parallaxed, fully shaded, detailed building interiors without adding additional geometric complexity to a scene. This technique was developed for Big Hero 6. Be sure to check out the supplemental materials on the publisher site for a cool video breakdown of the technique.
-
Path-space Motion Estimation and Decomposition for Robust Animation Filtering
Henning Zimmer, Fabrice Rousselle, Wenzel Jakob, Oliver Wang, David Adler, Wojciech Jarosz, Olga Sorkine-Hornung, and Alexander Sorkine-Hornung. Path-space Motion Estimation and Decomposition for Robust Animation Filtering. Computer Graphics Forum (Proceedings of Eurographics Symposium on Rendering 2015), 34(4), June 2015.
Joint project between DisneyResearch|Studios, ETH Zürich, and Disney Animation. This paper describes a denoising technique suitable for animated sequences. Not directly used in Hyperion’s denoiser, but both inspired by and influential towards Hyperion’s first generation denoiser.
-
Portal-Masked Environment Map Sampling
Benedikt Bitterli, Jan Novák, and Wojciech Jarosz. Portal-Masked Environment Map Sampling. Computer Graphics Forum (Proceedings of Eurographics Symposium on Rendering 2015), 34(4), June 2015.
Joint project between DisneyResearch|Studios and Disney Animation. This paper describes an efficient method for importance sampling environment maps. This paper was actually derived from the technique Hyperion uses for importance sampling lights with IES profiles, which has been used on all films rendered using Hyperion.
-
A Practical and Controllable Hair and Fur Model for Production Path Tracing
Matt Jen-Yuan Chiang, Benedikt Bitterli, Chuck Tappan, and Brent Burley. A Practical and Controllable Hair and Fur Model for Production Path Tracing. In ACM SIGGRAPH 2015 Talks, August 2015.
Joint project between DisneyResearch|Studios and Disney Animation. This short paper gives an overview of Hyperion’s fur and hair model, originally developed for use on Zootopia. A full paper was published later with more details. This fur/hair model is Hyperion’s fur/hair model today, used on every film beginning with Zootopia to present.
-
Extending the Disney BRDF to a BSDF with Integrated Subsurface Scattering
Brent Burley. Extending the Disney BRDF to a BSDF with Integrated Subsurface Scattering. In ACM SIGGRAPH 2015 Course Notes: Physically Based Shading in Theory and Practice, August 2015.
Internal project from Disney Animation. This paper describes the full Disney BSDF (sometimes referred to in the wider industry as Disney BRDF v2) used in Hyperion, and also describes a novel subsurface scattering technique called normalized diffusion subsurface scattering. The Disney BSDF is the shading model for everything ever rendered using Hyperion, and normalized diffusion was Hyperion’s subsurface model from Big Hero 6 up through Moana. For a public open-source implementation of the Disney BSDF, check out PBRT v3’s implementation. Also, check out Pixar’s RenderMan for an implementation in a commercial renderer!
-
Approximate Reflectance Profiles for Efficient Subsurface Scattering
Per H Christensen and Brent Burley. Approximate Reflectance Profiles for Efficient Subsurface Scattering. Pixar Technical Memo, #15-04, August 2015.
Joint project between Pixar and Disney Animation. This paper presents several useful parameterizations for the normalized diffusion subsurface scattering model presented in the previous paper in this list. These parameterizations are used for the normalized diffusion implementation in Pixar’s RenderMan 21 and later.
-
Big Hero 6: Into the Portal
David Hutchins, Olun Riley, Jesse Erickson, Alexey Stomakhin, Ralf Habel, and Michael Kaschalk. Big Hero 6: Into the Portal. In ACM SIGGRAPH 2015 Talks, August 2015.
Internal project from Disney Animation. This short paper describes some interesting volume rendering challenges that Hyperion faced during the production of Big Hero 6’s climax sequence, set in a volumetric fractal portal world.
-
Level-of-Detail for Production-Scale Path Tracing
Magdalena Martinek, Christian Eisenacher, and Marc Stamminger. Level-of-Detail for Production-Scale Path Tracing. In VMV 2015: Proceedings of the 20th International Symposium on Vision, Modeling, and Visualization, October 2015.
Joint project between Disney Animation and the University of Erlangen-Nurmberg. This paper gives an overview of a SVO-based level-of-detail system for use in production path tracing. This system was originally prototyped in an early version of Hyperion and informed the automatic shading level-of-detail system that was used on Big Hero 6; automatic shading level-of-detail has since been removed from Hyperion.
-
A Practical and Controllable Hair and Fur Model for Production Path Tracing
Matt Jen-Yuan Chiang, Benedikt Bitterli, Chuck Tappan, and Brent Burley. A Practical and Controllable Hair and Fur Model for Production Path Tracing. Computer Graphics Forum (Proceedings of Eurographics 2016), 35(2), May 2016.
Joint project between DisneyResearch|Studios and Disney Animation. This paper gives an overview of Hyperion’s fur and hair model, originally developed for use on Zootopia. This fur/hair model is Hyperion’s fur/hair model today, used on every film beginning with Zootopia to present. This paper is now also implemented in the open source PBRT v3 renderer, and also serves as the basis of the hair/fur shader in Chaos Group’s V-Ray Next renderer.
-
Subdivision Next-Event Estimation for Path-Traced Subsurface Scattering
David Koerner, Jan Novák, Peter Kutz, Ralf Habel, and Wojciech Jarosz. Subdivision Next-Event Estimation for Path-Traced Subsurface Scattering. In Proceedings of EGSR 2016, Experimental Ideas & Implementations, June 2016.
Joint project between DisneyResearch|Studios, University of Stuttgart, Dartmouth College, and Disney Animation. This paper describes a method for accelerating brute force path traced subsurface scattering; this technique was developed during early experimentation in making path traced subsurface scattering practical for production in Hyperion.
-
Nonlinearly Weighted First-Order Regression for Denoising Monte Carlo Renderings
Benedikt Bitterli, Fabrice Rousselle, Bochang Moon, José A. Iglesias-Guitian, David Adler, Kenny Mitchell, Wojciech Jarosz, and Jan Novák. Nonlinearly Weighted First-Order Regression for Denoising Monte Carlo Renderings. Computer Graphics Forum (Proceedings of Eurographics Symposium on Rendering 2016), 35(4), July 2016.
Joint project between DisneyResearch|Studios, Edinburgh Napier University, Dartmouth College, and Disney Animation. This paper describes a high-quality, stable denoising technique based on a thorough analysis of previous technique. This technique was developed during a larger project to develop a state-of-the-art successor to Hyperion’s first generation denoiser.
-
Practical and Controllable Subsurface Scattering for Production Path Tracing
Matt Jen-Yuan Chiang, Peter Kutz, and Brent Burley. Practical and Controllable Subsurface Scattering for Production Path Tracing. In ACM SIGGRAPH 2016 Talks, July 2016.
Internal project from Disney Animation. This short paper describes the novel parameterization and multi-wavelength sampling strategy used to make path traced subsurface scattering practical for production. Both of these are implemented in Hyperion’s path traced subsurface scattering system and have been in use on all shows beginning with Olaf’s Frozen Adventure to present.
-
Efficient Rendering of Heterogeneous Polydisperse Granular Media
Thomas Müller, Marios Papas, Markus Gross, Wojciech Jarosz, and Jan Novák. Efficient Rendering of Heterogeneous Polydisperse Granular Media. ACM Transactions on Graphics (Proceedings of SIGGRAPH Asia 2016), 35(6), November 2016.
External project from DisneyResearch|Studios, ETH Zürich, and Dartmouth College, inspired in part by production problems encountered at Disney Animation related to rendering things like sand, snow, etc. This technique uses shell transport functions to accelerate path traced rendering of massive assemblies of grains. Thomas Müller implemented an experimental version of this technique in Hyperion, along with an interesting extension for applying the shell transport theory to volume rendering.
-
Practical Path Guiding for Efficient Light-Transport Simulation
Thomas Müller, Markus Gross, and Jan Novák. Practical Path Guiding for Efficient Light-Transport Simulation. Computer Graphics Forum (Proceedings of Eurographics Symposium on Rendering 2017), 36(4), July 2017.
External joint project between DisneyResearch|Studios and ETH Zürich, inspired in part by challenges with handling complex light transport efficiently in Hyperion. Won the Best Paper Award at EGSR 2017! This paper describes a robust, unbiased technique for progressively learning complex indirect illumination in a scene during a render and intelligently guiding paths to better sample difficult indirect illumination effects. Implemented in Hyperion, along with a number of interesting improvements documented in a later paper. In use on Frozen 2 and future films.
-
Kernel-predicting Convolutional Networks for Denoising Monte Carlo Renderings
Steve Bako, Thijs Vogels, Brian McWilliams, Mark Meyer, Jan Novák, Alex Harvill, Pradeep Sen, Tony DeRose, and Fabrice Rousselle. Kernel-predicting Convolutional Networks for Denoising Monte Carlo Renderings. ACM Transactions on Graphics (Proceedings of SIGGRAPH 2017), 36(4), July 2017.
External joint project between University of California Santa Barbara, DisneyResearch|Studios, ETH Zürich, and Pixar, with project support from Disney Animation. Developed as part of the larger effort to develop a successor to Hyperion’s first generation denoiser. This paper describes a supervised learning approach for denoising filter kernels using deep convolutional neural networks. This technique is the basis of the modern Disney-Research-developed second generation deep-learning denoiser in use by the rendering teams at Pixar and ILM, and by the Hyperion iteam at Disney Animation.
-
Production Volume Rendering
Julian Fong, Magnus Wrenninge, Christopher Kulla, and Ralf Habel. Production Volume Rendering. In ACM SIGGRAPH 2017 Courses, July 2017.
Joint publication from Pixar, Sony Pictures Imageworks, and Disney Animation. This course covers volume rendering in modern path tracing renderers, from basic theory all the way to practice. The last chapter details the inner workings of Hyperion’s first and second generation transmittance estimation based volume rendering system, used from Big Hero 6 up through Moana.
-
Spectral and Decomposition Tracking for Rendering Heterogeneous Volumes
Peter Kutz, Ralf Habel, Yining Karl Li, and Jan Novák. Spectral and Decomposition Tracking for Rendering Heterogeneous Volumes. ACM Transactions on Graphics (Proceedings of SIGGRAPH 2017), 36(4), July 2017.
Joint project between DisneyResearch|Studios and Disney Animation. This paper describes two complementary new null-collision tracking techniques: decomposition tracking and spectral tracking. The paper also introduces to computer graphics an extended integral formulation of null-collision algorithms, originally developed in the field of reactor physics. These two techniques are the basis of Hyperion’s modern third generation null-collision tracking based volume rendering system, in use beginning on Olaf’s Frozen Adventure to present.
-
The Ocean and Water Pipeline of Disney’s Moana
Sean Palmer, Jonathan Garcia, Sara Drakeley, Patrick Kelly, and Ralf Habel. The Ocean and Water Pipeline of Disney’s Moana. In ACM SIGGRAPH 2017 Talks, July 2017.
Internal project from Disney Animation. This short paper describes the water pipeline developed for Moana, including the level set compositing and rendering system that was implemented in Hyperion. This system has since found additional usage on shows since Moana.
-
Recent Advancements in Disney’s Hyperion Renderer
Brent Burley, David Adler, Matt Jen-Yuan Chiang, Ralf Habel, Patrick Kelly, Peter Kutz, Yining Karl Li, and Daniel Teece. Recent Advancements in Disney’s Hyperion Renderer. In ACM SIGGRAPH 2017 Course Notes: Path Tracing in Production Part 1, August 2017.
Publication from Disney Animation. This paper describes various advancements in Hyperion since Big Hero 6 up through Moana, with a particular focus towards replacing multiple scattering approximations with true, brute-force path-traced solutions for both better artist workflows and improved visual quality.
-
Denoising with Kernel Prediction and Asymmetric Loss Functions
Thijs Vogels, Fabrice Rousselle, Brian McWilliams, Gerhard Rothlin, Alex Harvill, David Adler, Mark Meyer, and Jan Novák. Denoising with Kernel Prediction and Asymmetric Loss Functions. ACM Transactions on Graphics (Proceedings of SIGGRAPH 2018), 37(4), August 2017.
Joint project between DisneyResearch|Studios, Pixar, and Disney Animation. This paper describes a variety of improvements and extensions made to the 2017 Kernel-predicting Convolutional Networks for Denoising Monte Carlo Renderings paper; collectively, these improvements comprise the modern Disney-Research-developed second generation deep-learning denoiser in use in production at Pixar, ILM, and Disney Animation. At Disney Animation, used experimentally on Ralph Breaks the Internet and in full production beginning with Frozen 2.
-
Plausible Iris Caustics and Limbal Arc Rendering
Matt Jen-Yuan Chiang and Brent Burley. Plausible Iris Caustics and Limbal Arc Rendering. ACM SIGGRAPH 2018 Talks, August 2018.
Internal project from Disney Animation. This paper describes a technique for rendering realistic, physically based eye caustics using manifold next-event estimation combined with a plausible procedural geometric eye model. This realistic eye model is implemented in Hyperion and used on all projects beginning with Encanto.
-
The Design and Evolution of Disney’s Hyperion Renderer
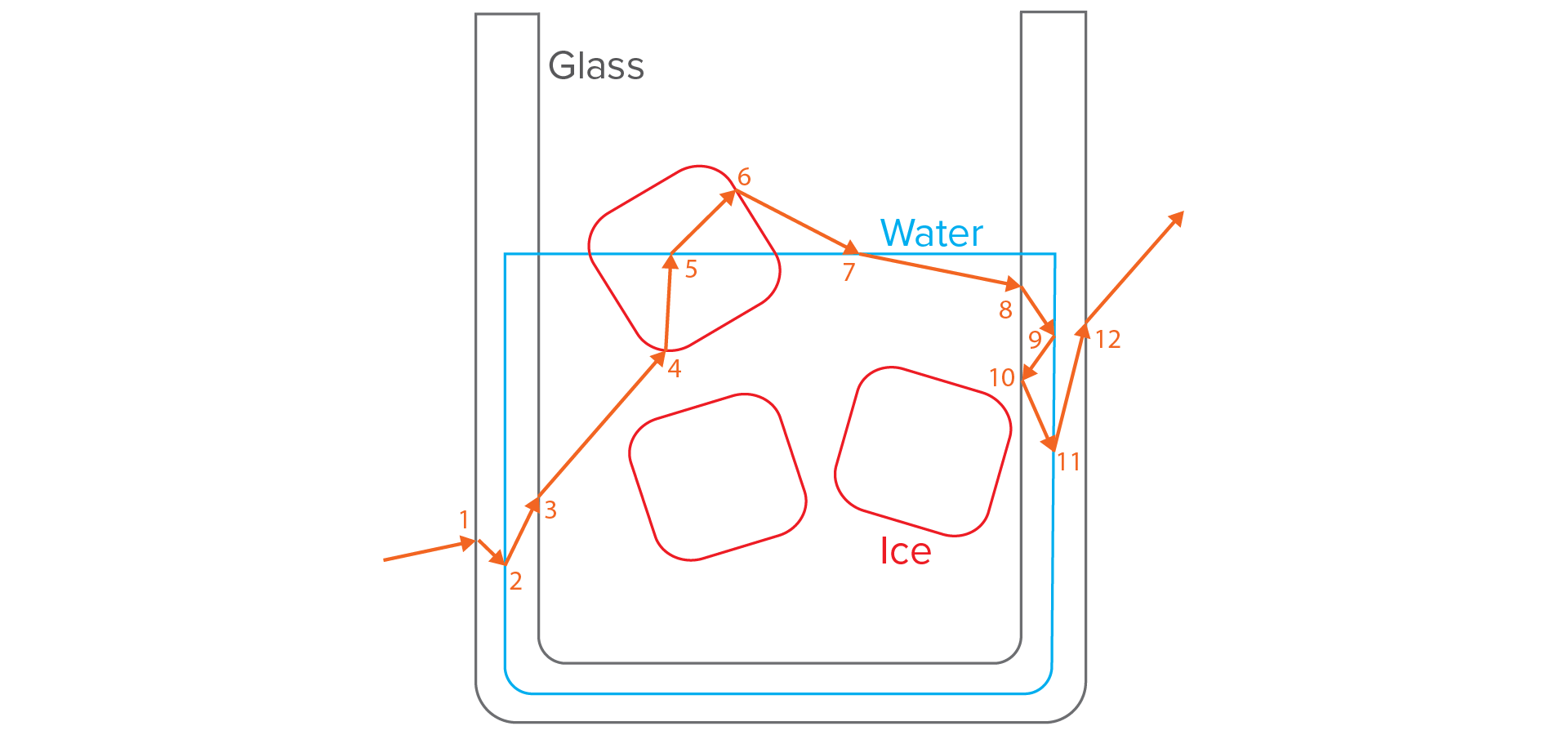
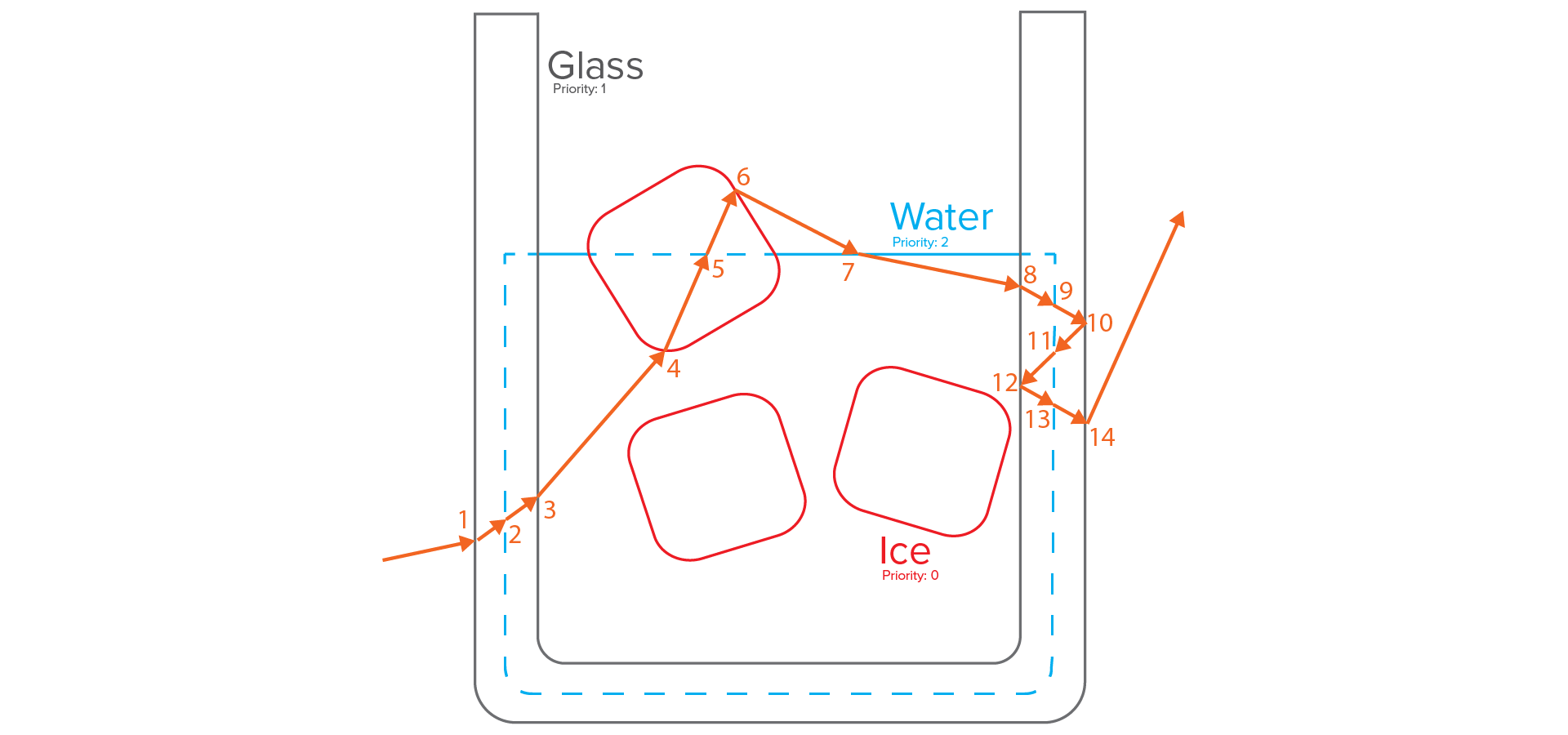
Brent Burley, David Adler, Matt Jen-Yuan Chiang, Hank Driskill, Ralf Habel, Patrick Kelly, Peter Kutz, Yining Karl Li, and Daniel Teece. The Design and Evolution of Disney’s Hyperion Renderer. ACM Transactions on Graphics, 37(3), August 2018.
Publication from Disney Animation. This paper is a systems architecture paper for the entirety of Hyperion. The paper describes the history of Disney’s Hyperion Renderer, the internal architecture, various systems such as shading, volumes, many-light sampling, emissive geometry, path simplification, fur rendering, photon-mapped caustics, subsurface scattering, and more. The paper also describes various challenges that had to be overcome for practical production use and artistic controllability. This paper covers everything in Hyperion beginning from Big Hero 6 up through Ralph Breaks the Internet.
-
Clouds Data Set
Walt Disney Animation Studios. Clouds Data Set, August 2018.
Publicly released data set for rendering research, by Disney Animation. This data set was produced by our production artists as part of the development process for Hyperion’s modern third generation null-collision tracking based volume rendering system.
-
Moana Island Scene Data Set
Walt Disney Animation Studios. Moana Island Scene Data Set, August 2018.
Publicly released data set for rendering research, by Disney Animation.
This data set is an actual production scene from Moana, originally rendered using Hyperion and ported to PBRT v3 for the public release. This data set gives a sense of the typical scene complexity and rendering challenges that Hyperion handles every day in production.
-
Denoising Deep Monte Carlo Renderings
Delio Vicini, David Adler, Jan Novák, Fabrice Rousselle, and Brent Burley. Denoising Deep Monte Carlo Renderings. Computer Graphics Forum, 38(1), February 2019.
Joint project between DisneyResearch|Studios and Disney Animation. This paper presents a technique for denoising deep (meaning images with multiple depth bins per pixel) renders, for use with deep-compositing workflows. This technique was developed as part of general denoising research from DisneyResearch|Studios and the Hyperion team.
-
The Challenges of Releasing the Moana Island Scene
Rasmus Tamstorf and Heather Pritchett. The Challenges of Releasing the Moana Island Scene. In Proceedings of EGSR 2019, Industry Track, July 2019.
Short paper from Disney Animation’s research department, discussing some of the challenges involved in preparing a production Hyperion scene for public release. The Hyperion team provided various support and advice to the larger studio effort to release the Moana Island Scene.
-
Practical Path Guiding in Production
Thomas Müller. Practical Path Guiding in Production. In ACM SIGGRAPH 2019 Course Notes: Path Guiding in Production, July 2019.
Joint project between DisneyResearch|Studios and Disney Animation. This paper presents a number of improvements and extensions made to Practical Path Guiding developed by in Hyperion by Thomas Müller and the Hyperion team. In use in production on Frozen 2.
-
Machine-Learning Denoising in Feature Film Production
Henrik Dahlberg, David Adler, and Jeremy Newlin. Machine-Learning Denoising in Feature Film Production. In ACM SIGGRAPH 2019 Talks, July 2019.
Joint publication from Pixar, Industrial Light & Magic, and Disney Animation. Describes how the modern Disney-Research-developed second generation deep-learning denoiser was deployed into production at Pixar, ILM, and Disney Animation.
-
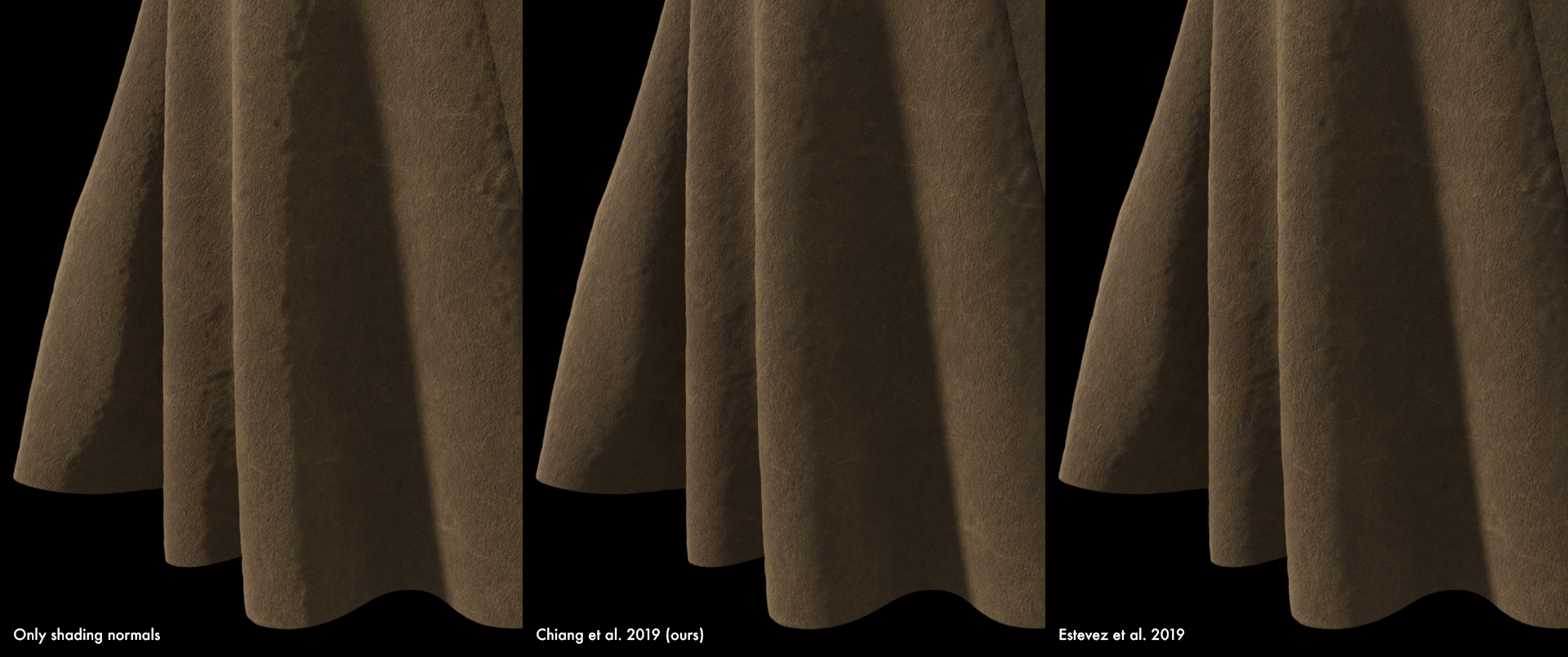
Taming the Shadow Terminator
Matt Jen-Yuan Chiang, Yining Karl Li, and Brent Burley. Taming the Shadow Terminator. In ACM SIGGRAPH 2019 Talks, August 2019.
Internal project from Disney Animation. This short paper describes a solution to the long-standing “shadow terminator” problem associated with using shading normals. The technique in this paper is implemented in Hyperion and has been in use in production starting on Frozen 2 through present.
-
On Histogram-Preserving Blending for Randomized Texture Tiling
Brent Burley. On Histogram-Preserving Blending for Randomized Texture Tiling. Journal of Computer Graphics Techniques, 8(4), November 2019.
Internal project from Disney Animation. This paper describes some modiciations to the histogram-preserving hex-tiling algorithm of Heitz and Neyret; these modifications make implementing the Heitz and Neyret technique easier and more efficient. This paper describes Hyperion’s implementation of the technique, in use in production starting on Frozen 2 through present.
-
The Look and Lighting of “Show Yourself” in “Frozen 2”
Amol Sathe, Lance Summers, Matt Jen-Yuan Chiang, and James Newland. The Look and Lighting of “Show Yourself” in “Frozen 2”. In ACM SIGGRAPH 2020 Talks, August 2020.
Internal project from Disney Animation. This paper describes the process that went into achieving the final look and lighting of the “Show Yourself” sequence in Frozen 2, including a new tabulation-based approach implemented in Hyperion to maintain energy conservation in rough dielectric reflection and transmission.
-
Practical Hash-based Owen Scrambling
Brent Burley. Practical Hash-based Owen Scrambling. Journal of Computer Graphics Techniques, 9(4), December 2020.
Internal project from Disney Animation. This paper describes a new version of Owen scrambling for the Sobol sequence that is both simple to implement, efficient to evaluate, and broadly applicable to various problems.
-
Unbiased Emission and Scattering Importance Sampling For Heterogeneous Volumes
Wei-Feng Wayne Huang, Peter Kutz, Yining Karl Li, and Matt Jen-Yuan Chiang. Unbiased Emission and Scattering Importance Sampling For Heterogeneous Volumes. In ACM SIGGRAPH 2021 Talks, August 2021.
Internal project from Disney Animation. This paper describes a pair of new unbiased distance-sampling methods for production volume path tracing, with a specific focus on sampling emission and scattering. First used on Raya and the Last Dragon.
-
The Atmosphere of Raya and the Last Dragon
Marc Bryant, Ryan DeYoung, Wei-Feng Wayne Huang, Joe Longson, and Noel Villegas. The Atmosphere of Raya and the Last Dragon. In ACM SIGGRAPH 2021 Talks, August 2021.
Internal project from Disney Animation. This paper describes the various rendering and workflow improvements that went into rendering atmospheric volumes to produce the highly atmospheric lighting in Raya and the Last Dragon.
-
Practical Multiple-Scattering Sheen Using Linearly Transformed Cosines
Tizian Zeltner, Brent Burley, and Matt Jen-Yuan Chiang. Practical Multiple-Scattering Sheen Using Linearly Transformed Cosines. In ACM SIGGRAPH 2022 Talks, August 2022.
Joint project between École Polytechnique Fédérale de Lausanne (EPFL) and Disney Animation. This paper descibes the new multiple-scattering sheen model used in the Disney Principled BSDF starting with the production of Strange World.
-
Deep Adaptive Sampling and Reconstruction Using Analytic Distributions
Farnood Salehi, Marco Manzi, Gerhard Rothlin, Romann Weber, Christopher Schroers, and Marios Papas. Deep Adaptive Sampling and Reconstruction Using Analytic Distributions. ACM Transactions on Graphics (Proceedings of SIGGRAPH Asia 2022), 41(6), December 2022.
External project from DisneyResearch|Studios, with project support from Disney Animation. This paper extends Disney’s deep learning denoising technology to also drive adaptive sampling during the rendering process. Part of a larger joint research project between DisneyResearch|Studios, Disney Animation, Pixar, and Industrial Light & Magic on denoising techniques.
-
“Encanto” - Let’s Talk About Bruno’s Visions
Corey Butler, Brent Burley, Wei-Feng Wayne Huang, Yining Karl Li, and Benjamin Huang. “Encanto” - Let’s Talk About Bruno’s Visions. In ACM SIGGRAPH 2022 Talks, August 2022.
Internal project from Disney Animation. This paper describes the process of creating the holographic prophecy shards from Encanto, including a new teleportation shader in Hyperion that was developed specifically to support this effect.
-
Fracture-Aware Tessellation of Subdivision Surfaces
Brent Burley and Francisco Rodriguez. Fracture-Aware Tessellation of Subdivision Surfaces. In ACM SIGGRAPH 2022 Talks, August 2022.
Internal project from Disney Animation. This paper describes a new tessellation algorithm for fractured subdivision surfaces, used as part of Disney Animation’s destruction FX pipeline and implemented in Hypeprion. First used in production on Encanto.
-
Deep Compositional Denoising on Frame Sequences
Xianyao Zhang, Gerhard Rothlin, Marco Manzi, Markus Gross, and Marios Papas. Deep Compositional Denoising on Frame Sequences. In EGSR 2023: Proceedings of the 34th Eurographics Symposium on Rendering, June 2023.
External project from DisneyResearch|Studios, with project support from Disney Animation. This paper unifies previously separate approaches used in Disney’s deep learning denoising system for single-frame compositional denoising and multi-frame non-compositional denoising. Part of a larger joint research project between DisneyResearch|Studios, Disney Animation, Pixar, and Industrial Light & Magic on denoising techniques.
-
Progressive Null-Tracking for Volumetric Rendering
Zackary Misso, Yining Karl Li, Brent Burley, Daniel Teece, and Wojciech Jarosz. Progressive Null Tracking for Volumetric Rendering. SIGGRAPH ‘23: ACM SIGGRAPH 2023 Conference Proceedings, August 2023.
Joint project between Dartmouth College and Disney Animation. This paper describes a new method to progressively learn bounding majorants when using null-tracking techniques to perform unbiased rendering of general heterogeneous volumes with unknown bounding majorants.
-
Splat: Developing a ‘Strange’ Shader
Kendall Litaker, Brent Burley, Dan Lipson, and Mason Khoo. Splat: Developing a ‘Strange’ Shader. In ACM SIGGRAPH 2023 Talks, August 2023.
Internal project from Disney Animation. This paper describes the unusual challenges encountered when developing the unique shading and look for the Splat character from Strange World.
-
Neural Denoising for Deep-Z Monte Carlo Renderings
Xianyao Zhang, Gerhard Rothlin, Shilin Zhu, Tunç Ozan Aydin, Farnood Salehi, Markus Gross, Marios Papas. Neural Denoising for Deep-Z Monte Carlo Renderings. Computer Graphics Forum (Proceedings of Eurographics 2024), 43(2), April 2024.
External joint project between DisneyResearch|Studios and Pixar, with project support from Disney Animation. This paper describes an extension to Disney’s deep learning denoising technology to add support for deep-Z images and deep compositing workflows. Part of a larger joint research project between DisneyResearch|Studios, Disney Animation, Pixar, and Industrial Light & Magic on denoising techniques.
-
Cache Points for Production-Scale Occlusion-Aware Many-Lights Sampling and Volumetric Scattering
Yining Karl Li, Charlotte Zhu, Gregory Nichols, Peter Kutz, Wei-Feng Wayne Huang, David Adler, Brent Burley, and Daniel Teece. Cache Points for Production-Scale Occlusion-Aware Many-Lights Sampling and Volumetric Scattering. In DigiPro ‘24: Proceedings of the Digital Production Symposium 2024, July 2024.
Internal project from Disney Animation. This paper describes Hyperion’s unique many-lights importance sampling system. Used on every project rendered using Hyperion to date, this paper contains deep implementation details and notes from a decade of production experience.
-
Dynamic Screen Space Textures for Coherent Stylization
Brent Burley, Brian Green, and Daniel Teece. Dynamic Screen Space Textures for Coherent Stylization. In ACM SIGGRAPH 2024 Talks, July 2024.
Internal project from Disney Animation. This paper describes a novel new dynamic screen space texturing system that makes up a key part of the stylized watercolor look of Wish.
-
Volume Scattering Probability Guiding
Kehan Xu, Sebastian Herholz, Marco Manzi, Marios Papas, and Markus Gross. Volume Scattering Probability Guiding. ACM Transactions on Graphics (Proceedings of SIGGRAPH Asia 2024), 43(6), December 2024.
External joint project between DisneyResearch|Studios and Intel, with project support from Disney Animation. This paper describes an improvement to volume path guiding that enables direct control over volume scattering probability. Part of a larger joint research project between DisneyResearch|Studios, Disney Animation, Pixar, and Industrial Light & Magic on path guiding techniques.
-
Neural Resampling with Optimized Candidate Allocation
Alexander Rath, Marco Manzi, Farnood Salehi, Sebastian Weiss, Tiziano Portenier, Saeed Hadadan, and Marios Papas. Neural Resampling with Optimized Candidate Allocation. In EGSR 2025: Proceedings of the 36th Eurographics Symposium on Rendering, June 2025.
Joint project between DisneyResearch|Studios and Disney Animation. This paper presents an experimental implementation of GPU-based neural learning system inside of Hyperion’s CPU-based architecture, suitable for use as both a path guiding system and for radiance caching. Part of a larger joint research project between DisneyResearch|Studios, Disney Animation, Pixar, and Industrial Light & Magic on path guiding techniques.
-
A Texture Streaming Pipeline for Real-Time GPU Ray Tracing
Mark Lee, Nathan Zeichner, and Yining Karl Li. A Texture Streaming Pipeline for Real-Time GPU Ray. In ACM SIGGRAPH 2025 Talks, August 2025.
Internal project from Disney Animation. This paper describes our implementation of a streaming textures system on the GPU for Ptex, which is in use in our in-house GPU path tracing previsualization renderer.
-
Path Guiding Surfaces and Volumes in Disney’s Hyperion Renderer: A Case Study
Lea Reichardt, Brian Green, Yining Karl Li, and Marco Manzi. Path Guiding Surfaces and Volumes in Disney’s Hyperion Renderer: A Case Study. In ACM SIGGRAPH 2025 Course Notes: Path Guiding in Production and Recent Advancements, August 2025.
Joint project from DisneyResearch|Studios and Disney Animation. This paper describes how we’ve implemented Hyperion’s second-generation path guiding system, and what we’ve learned from bridging cutting edge research into production usage.
Again, this post is meant to be a living document; any new publications with involvement from the Hyperion team will be added here.
Of course, the Hyperion team is not the only team at Disney Animation that regularly publishes; for a full list of publications from Disney Animation, see the official Disney Animation publications page.
The Disney Animation Technology website is also worth keeping an eye on if you want to keep up on what our engineers and TDs are working on!
If you’re just getting started and want to learn more about rendering in general, the must-read text that every rendering engineer has on their desk or bookshelf is Physically Based Rendering 3rd Edition by Matt Pharr, Wenzel Jakob, and Greg Humphreys (now available online completely for free!).
Also, the de-facto standard beginner’s text today is the Ray Tracing in One Weekend series by Peter Shirley, which provides a great, gentle, practical introduction to ray tracing, and is also available completely for free.
Also take a look at Real-Time Rendering 4th Edition, Ray Tracing Gems (also available online for free), The Graphics Codex by Morgan McGuire, and Eric Haines’s Ray Tracing Resources page.
For even further exploration, extensive course notes are available from SIGGRAPH courses every year. Particularly good recurring courses to look at from past years are the Path Tracing in Production course (2017, 2018, 2019), the absolutely legendary Physically Based Shading course (2010, 2012, 2013, 2014, 2015, 2016, 2017), the various incarnations of a volume rendering course (2011, 2017, 2018), and now due to the dawn of ray tracing in games, Advances in Real-Time Rendering and Open Problems in Real-Time Rendering.
Also, Stephen Hill typically collects links to all publicly available course notes, slides, source code, and more for SIGGRAPH each year after the conference on his blog; both his blog and the blogs listed on the sidebar of his website are essentially mandatory reading in the rendering world.
Also, interesting rendering papers are always being published in journals and at conferences.
The major journals to check are ACM Transactions on Graphics (TOG), Computer Graphics Forum (CGF), and the Journal of Computer Graphics Techniques (JCGT); the major academic conferences where rendering stuff appears are SIGGRAPH, SIGGRAPH Asia, EGSR (Eurographics Symposium on Rendering), HPG (High Performance Graphics), MAM (Workshop on Material Appearance Modeling), EUROGRAPHICS, and i3D (ACM SIGGRAPH Symposium on Interactive 3D Graphics and Games); another three industry conferences where interesting stuff often appears are DigiPro, GDC (Game Developers Conference) and GTC (Graphics Technology Conference).
A complete listing of the contents for all of these conferences every year, along with links to preprints, is compiled by Ke-Sen Huang.
A large number of people have contributed directly to Hyperion’s development since the beginning of the project, in a variety of capacities ranging from core developers to TDs and support staff and all the way to notable interns. In no particular order, including both present and past: Daniel Teece, Brent Burley, David Adler, Yining Karl Li, Mark Lee, Charlotte Zhu, Brian Green, Andrew Bauer, Lea Reichardt, Mackenzie Thompson, Wei-Feng Wayne Huang, Matt Jen-Yuan Chen, Joe Schutte, Andrew Gartner, Jennifer Yu, Peter Kutz, Ralf Habel, Patrick Kelly, Gregory Nichols, Andrew Selle, Christian Eisenacher, Jan Novák, Ben Spencer, Doug Lesan, Lisa Young, Tami Valdez, Andrew Fisher, Noah Kagan, Benedikt Bitterli, Thomas Müller, Tizian Zeltner, Zackary Misso, Magdalena Martinek, Mathijs Molenaar, Laura Lediav, Guillaume Loubet, David Koerner, Simon Kallweit, Gabor Liktor, Ulrich Muller, Norman Moses Joseph, Stella Cheng, Marc Cooper, Tal Lancaster, and Serge Sretschinsky.
Over the years, our closest research partners at DisneyResearch|Studios, Pixar Animation Studios, Industrial Light & Magic, and elsewhere have included (in no particular order): Marios Papas, Marco Manzi, Tiziano Portenier, Alexander Rath, Rajesh Sharma, Rasmus Tamstorf, Jan Novák, Gerhard Roethlin, Per Christensen, Julian Fong, Mark Meyer, André Mazzone, Wojciech Jarosz, Fabrice Rouselle, Christophe Hery, Ryusuke Villemin, and Magnus Wrenninge.
Invaluable support from studio leadership over the years has been provided by (again, in no particular order): Nick Cannon, Munira Tayabji, Rebecca Bever, Bettina Martin, Laura Franek, Collin Larkins, Golriz Fanai, Rajesh Sharma, Chuck Tappan, Sean Jenkins, Darren Robinson, Alex Nijmeh, Hank Driskill, Kyle Odermatt, Adolph Lusinsky, Ernie Petti, Kelsey Hurley, Shweta Viswanathan, Tad Miller, Mark Hammel, Mohit Kallianpur, Brian Leach, Daniel Rice, Amol Sathe, Alessandro Jacomini, Josh Staub, Steve Goldberg, Scott Kersavage, Andy Hendrickson, Dan Candela, Ed Catmull, and many others.
Of course, beyond this enormous list, there is an even more enormous list of countless artists, technical directors, production supervisors, and other technology development teams at Disney Animation who motivated Hyperion, participated in its development, and contributed to its success.
If anything in this post has caught your interest, keep an eye out for open position listings on DisneyAnimation.com; maybe these lists can one day include you!
Finally, here is a list of all publicly released and announced projects to date made using Disney’s Hyperion Renderer:
VR project running on Unreal Engine, with shading and textures baked out of Disney’s Hyperion Renderer.
keyboard_return
VR project running on Unity, with shading and textures baked out of Disney’s Hyperion Renderer.
keyboard_return
CG animation provided by Disney Animation, incorporated into park rides built by Walt Disney Imagineering.
keyboard_return